WALKING ROBOT
Course:
ENGS 76
Machine Engineering
Date:
Fall 2015
Team Size:
3
Key Responsibilities:
Chassis Design & Manufacturing
Gearbox Design
Translational Mechanism Analysis
Skills:
Certified Solidworks Associate
Machining (Mill, Lathe)
Motor Analysis
CHALLENGE: To design a joystick-controlled machine that cannot employ wheels for locomation and can navigate through an obstacle course.
Our team (Peter Lobel, Sean Howe & I) placed third out of eleven teams on competition day.
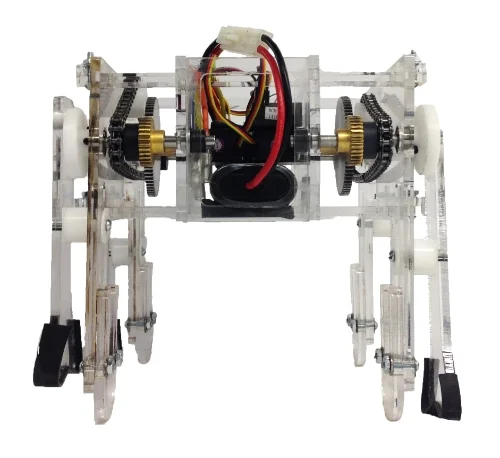
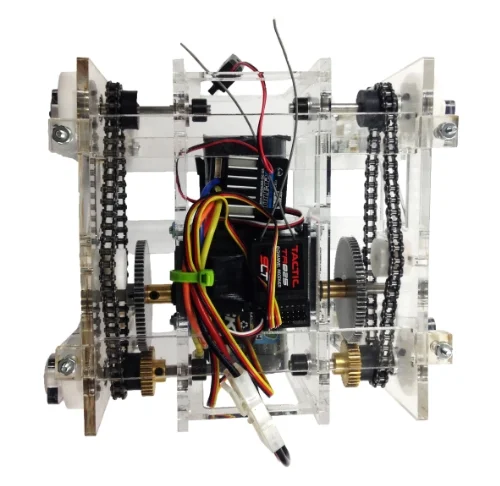
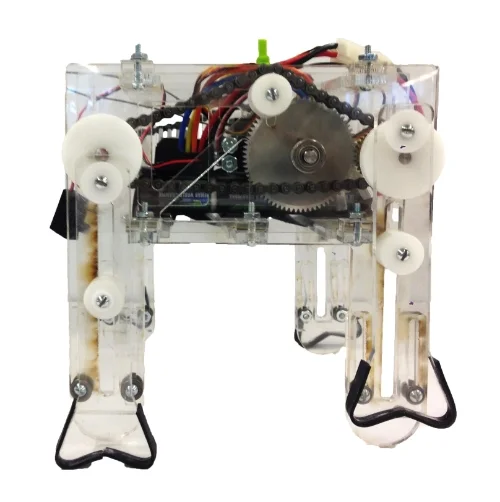
From Left to Right: Front View, Top View, Side View
WATCH THE ROBOT IN ACTION:
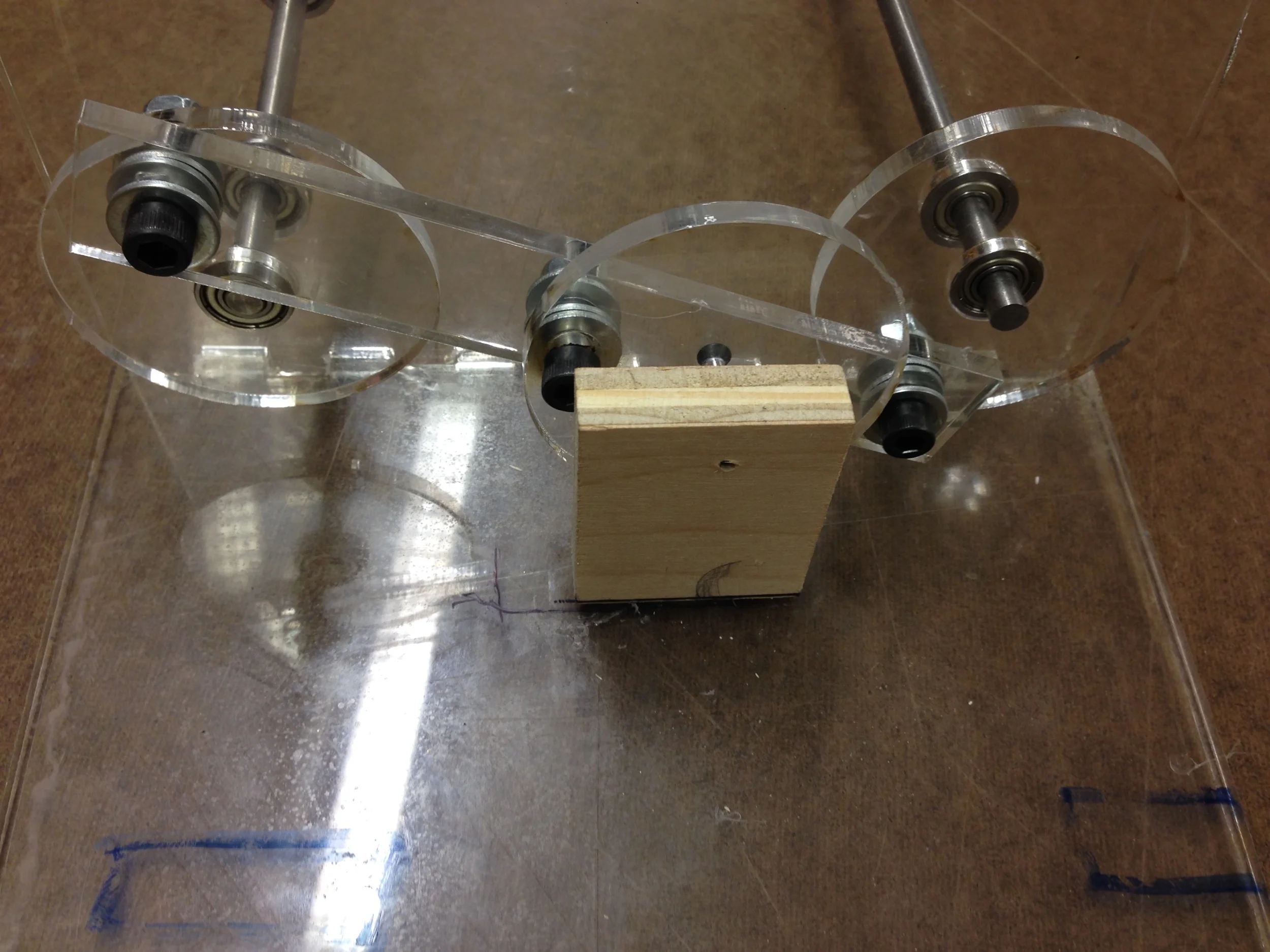
PATHWAY TO SOLUTION:
Below is a slideshow of key stages in the design process. For a more detailed process, feel free to check out my design journal.